Màquina de polit robòtica: acabat superficial automatitzat d'alta precisió





Diagrama detallat
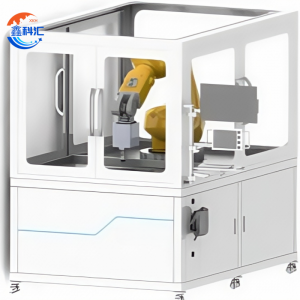

Visió general de la màquina de polir robòtica
La màquina de polit robòtica és un sistema avançat de processament de superfícies totalment automatitzat, dissenyat per complir els requisits més alts en la fabricació de precisió. Combina el control robòtic de sis eixos, la tecnologia de polit amb retroalimentació de força i la configuració de doble capçal per manejar una àmplia gamma de materials i geometries complexes amb una precisió i consistència excepcionals.
Tant si es tracta de lents òptiques, peces aeroespacials, components d'enginyeria de precisió o aplicacions de semiconductors, aquesta màquina ofereix acabats superficials estables, repetibles i d'alta qualitat, fins i tot amb toleràncies de nivell nanomètric.


Compatibilitat completa de la peça de treball de la màquina de polir robòtica
El sistema admet el processament de:
-
superfícies planesper a plaques de vidre, ceràmica i metall
-
Formes cilíndriques i còniquescom ara rodets, eixos i tubs
-
Components esfèrics i asfèricsper a sistemes òptics
-
Superfícies de forma lliure i fora d'eixamb corbes i transicions complexes
La seva versatilitat la fa adequada per atant la producció en massa com la fabricació personalitzada d'alta precisió.
Característiques i avantatges principals de la màquina de polir robòtica
1. Tecnologia de doble capçal de polit
-
Equipat ambrotació únicaiautorotaciócapçals de polit per a més flexibilitat.
-
La capacitat de canvi ràpid d'eines admet múltiples modes de processament sense llargs temps d'inactivitat.
-
Ideal per canviar entre etapes de poliment gruixut i fi.
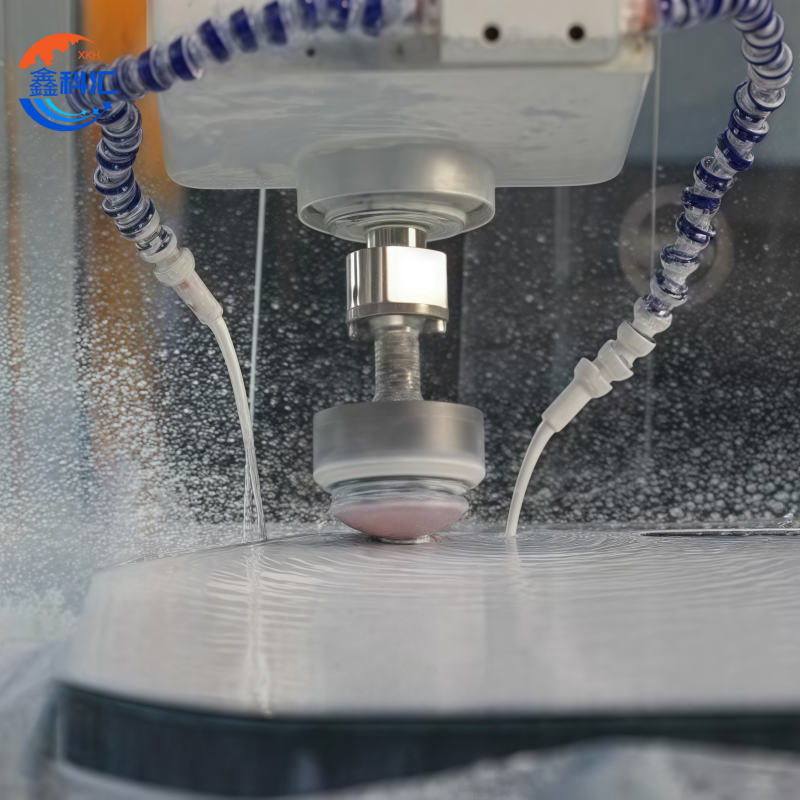
2. Sistema de control de força de precisió
-
Monitorització en temps real depressió, temperatura i flux de fluid de poliment.
-
L'aplicació consistent de la força garanteix un acabat superficial uniforme a tota la peça.
-
Capaç d'adaptar-se automàticament a les irregularitats de la superfície.
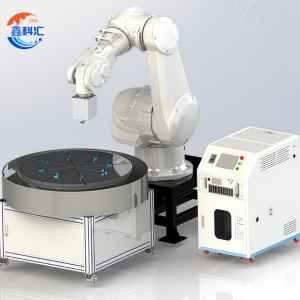
3. Control robòtic de sis eixos
-
Plena llibertat de moviment per gestionar geometries complexes.
-
Trajectòries de moviment suaus i precises calculades mitjançant algoritmes avançats.
-
Alta precisió de posicionament repetitiu de ±0,04 mm a ±0,1 mm segons el model.
4. Automatització i mesurament intel·ligents
-
Eines d'autocalibratge per a una configuració i alineació precises.
-
Sistema de mesura de coordenades per a un posicionament precís.
-
Opcionalmonitorització de gruix en líniaper al control de qualitat en temps real.
5. Qualitat de construcció de grau industrial
-
El disseny de doble servomotor augmenta l'eficiència i l'estabilitat del polit.
-
L'estructura mecànica rígida minimitza les vibracions i garanteix una durabilitat a llarg termini.

Especificacions tècniques de la màquina de polir robòtica
| Model d'equip | Cos de robot | Precisió de posicionament repetit | Rang de diàmetre de processament | Capçal de polit de rotació única | Capçal de polit multirotació | Eina petita | Poliment tipus roda principal | Polit de capçal esfèric | Finalitza el canvi ràpid | Eina de calibratge automàtic | Capçal de mesura de coordenades | Monitorització de gruixos en línia | Plataforma de Control Numèric |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| IRP500S | Staubli TX2-90L | ±0,04 mm / rang complet | Φ50~Φ500mm | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP600S | Staubli TX2-140 | ±0,05 mm / rang complet | Φ50~Φ600mm | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP800S | Staubli TX2-160 | ±0,05 mm / rang complet | Φ80~Φ800mm | √ | √ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000S | Staubli TX200/L | ±0,06 mm / rang complet | Φ100~Φ1000mm | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000A | ABB IRB6700-200/2.6 | ±0,1 mm / rang complet | Φ100~Φ1000mm | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP2000A | ABB IRB6700-150/3.2 | ±0,1 mm / rang complet | Φ200~Φ2000mm | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
| IRP2000AD | ABB IRB6700-150/3.2 | ±0,1 mm / rang complet | Φ200~Φ2000mm | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
Preguntes freqüents – Màquina de polir robotitzada
1. Quins tipus de peces pot gestionar la màquina de polir robotitzada?
La nostra màquina de polit robotitzada admet diverses formes i superfícies, incloent-hi contorns plans, corbs, esfèrics, de forma lliure i complexos. És adequada per a components òptics, motlles de precisió, superfícies metàl·liques i altres aplicacions de polit d'alta precisió.
2. Quina diferència hi ha entre els capçals de polit de rotació única i multirotació?
-
Capçal de polit de rotació únicaL'eina gira al voltant d'un sol eix, ideal per a l'acabat superficial estàndard i l'eliminació de material a alta velocitat.
-
Capçal de polit multirotacióL'eina combina la rotació amb l'autorotació (òrbita), permetent un polit més uniforme en superfícies corbes i irregulars.
3. Quin és el diàmetre màxim de processament?
Segons el model:
-
Els models compactes (per exemple, IRP500S) gestionenΦ50–Φ500mm.
-
Els models a gran escala (per exemple, IRP2000AD) gestionen fins aΦ2000mm.
Sobre nosaltres
XKH s'especialitza en el desenvolupament, la producció i la venda d'alta tecnologia de vidre òptic especial i nous materials cristallins. Els nostres productes serveixen a l'electrònica òptica, l'electrònica de consum i l'exèrcit. Oferim components òptics de safir, cobertes de lents per a telèfons mòbils, ceràmica, LT, SIC de carbur de silici, quars i oblies de cristall semiconductor. Amb experiència qualificada i equips d'avantguarda, destaquem en el processament de productes no estàndard, amb l'objectiu de ser una empresa líder en materials optoelectrònics d'alta tecnologia.

Productes relacionats
-
Substrat de galeta LiNbO3 de 3 polzades i 4 polzades i 6 polzades...
-

Recerca de producció de 4H-N/6H-N SiC Wafer Dummy ...
-

Màquina de polit de feix d'ions per a safir SiC Si
-

Pins d'elevació de safir premium monocristall Al₂O₃...
-
Material YAG de genstone crua feta al laboratori de color blau Paraiba...
-

Tub de safir de fabricació de precisió transparent...